The Running Chick-Inn: An Autonomous Chicken Coop
Abstract
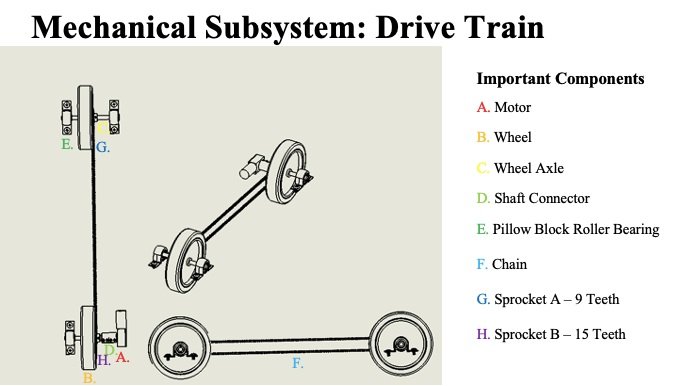
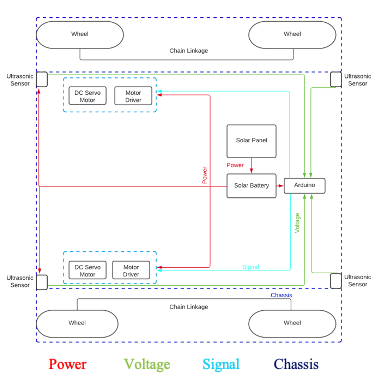
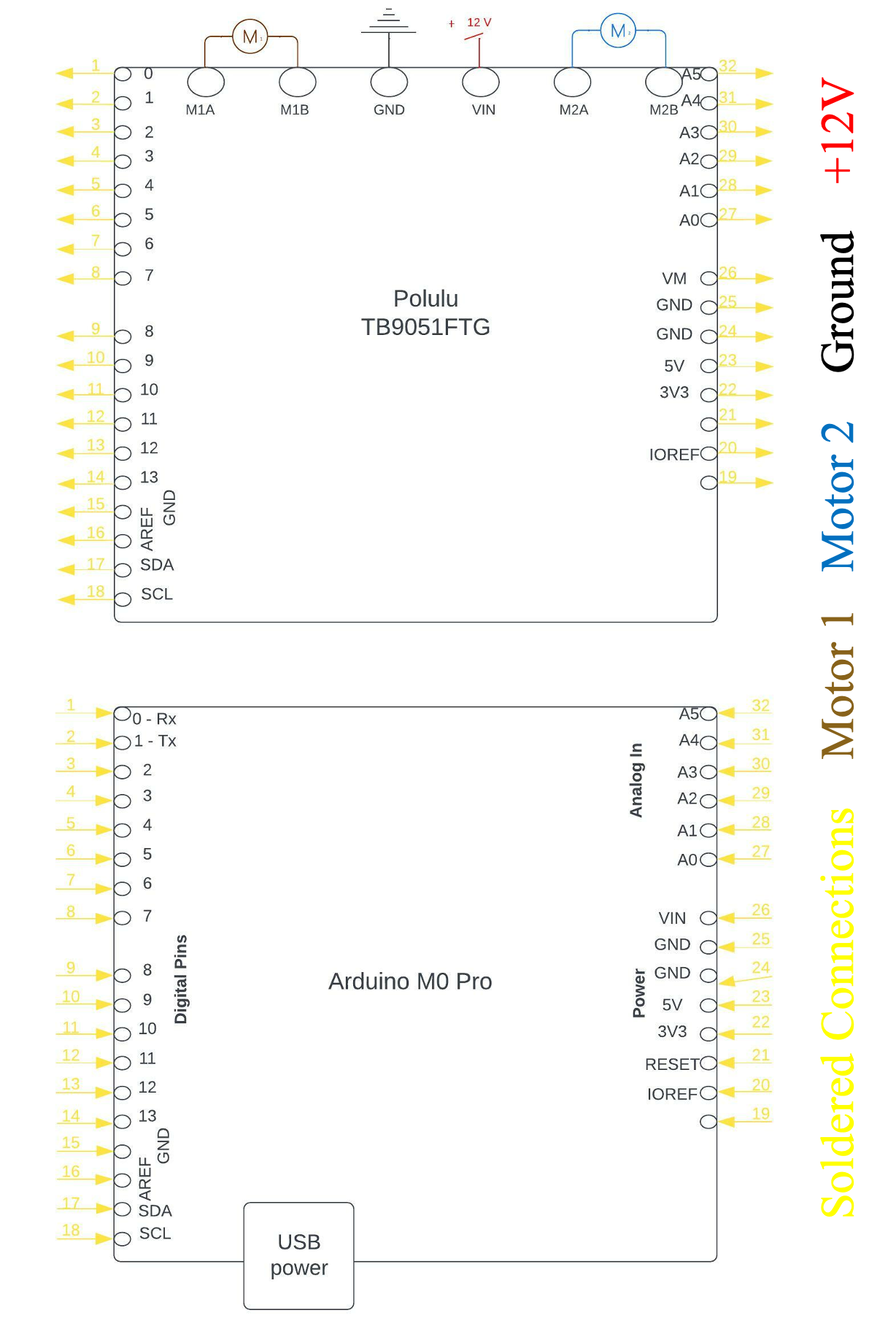
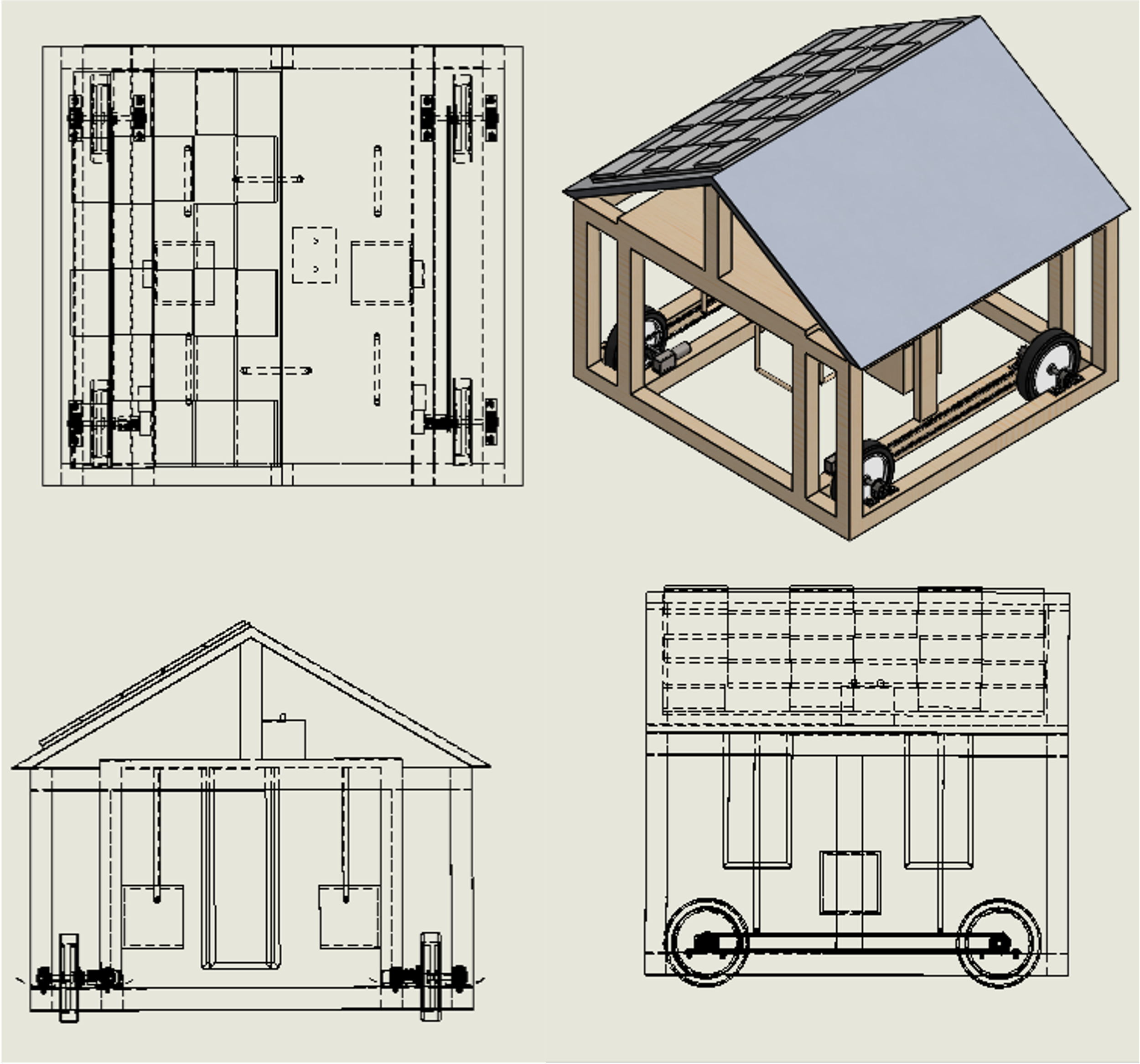
This project consists of the design, modeling, fabrication, and testing of an autonomous backyard chicken coop. Backyard chicken coops are an important contributor to reducing the number of chickens in battery cages and increasing egg production, but current solutions are time-intensive, expensive, and destructive of property. The goal of this project is to increase accessibility for owning backyard chickens. For the scope of this project, the coop was scaled down to one-fifth of its anticipated full-size model. The Running Chick-Inn was designed and built using integrated subsystems: architecture, mechanical drive train, boundary and obstacle detection, and power and control.

Why is a backyard chicken coop an important topic?
The Average American consumes 280 eggs/year. 380 million hens are used to produce this many eggs. Of those hens, 95% live in battery cages where they have less space than the size of a standard sheet of A2 paper. They are subjected to ammonia burns and severe respiratory illness. They are fed until they can no longer walk so they frequently die because they cannot get to water. Their beaks are removed so they don’t peck each other to death, a process that is known to be excruciatingly painful. In these living conditions, hens produce much unhealthier eggs than their pasture-raised counterparts. Caged hens produce eggs with high dosages of cholesterol and saturated fats and low quantities of vitamins and beta carotene. Unfortunately, due to the space required and other low incentives for farmers to pasture-raise hens, there hasn’t been a substantial change in living conditions. Backyard chickens have the potential to decrease the numbers of hens living in battery cages and provide Americans with much healthier eggs. With the design of a mechanism that moves hens around a yard: hens will not destroy the space, they will not need artificial feed and they will require minimal commitment from owners.

The Running Chick-Inn
From August 2021 through April 2022, I worked on my senior thesis project. The idea was to build a scaled down model of an autonomous chicken coop that would make keeping chickens in the backyard highly feasible for many Americans. I ideated, designed, prototyped, built, tested, evaluated, and presented this project, making all decisions along the way and overcoming many barriers. The project was ultimately deemed a success: the project was highlighted on the Harvard School of Engineering and Applied Sciences website (link below) and the project was given a grade of an A-.
Gallery
Throughout the process of designing and building the Running Chick-Inn, the project was documented using visual media. A few of these images are provided below to summarize the project and process. If your interest extends beyond this media, then feel free to look through the Full Report, Final Presentation and Design Fair Poster that are provided below the gallery.